


近日,IEEE国际机器人与自动化会议(ICRA)2026年度奖项在奥地利维也纳正式揭晓。中国具身智能企业RoboScience机器科学首席科学家、新加坡国立大学助理教授邵林团队的最新研究成果 《Bi-Adapt: Few-Shot Bimanual Adaptation for Novel Categories of 3D Objects Via Semantic Correspondence》 成功入围Robot Manipulation and Locomotion(机器人操作与移动) Best Paper Finalist(最佳论文奖提名)。据悉,本届同时入围最佳论文提名的还包括来自伯克利大学、斯坦福大学、麻省理工学院与清华大学等全球头部高校研发团队。

在本届ICRA 论文录用结果中,邵林团队共有10篇研究成果成功入选。这些论文聚焦具身大模型、灵巧抓取、社交导航、低成本力感知与混合任务规划等核心方向,系统性地推进了具身智能的技术边界。
据了解,2025年,邵林团队曾凭借灵巧抓取框架 D(R,O) Grasp 从全球超过四千篇投稿中脱颖而出,最终斩获“机器人操作与运动最佳论文奖”(Best Paper Award on Robot Manipulation and Locomotion)。今年再获提名,彰显了中国企业在国际具身智能领域持续扩大的学术影响力和领先的技术实力。
ICRA是全球机器人领域规模、学术水平均位列前沿的行业会议——由电气与电子工程师协会(IEEE)主办,是机器人学界公认的“风向标”,其最佳论文奖代表了当年度机器人领域具有突破性的研究成果。操作与运动作为具身智能的两大核心方向,相关奖项的竞争尤为激烈。今年获得提名的 Bi-Adapt 聚焦具有挑战性的双臂协作场景。双臂操作要求两只手臂协调配合,但现有方法往往依赖大量昂贵数据且难以泛化到新类别物体。Bi-Adapt通过语义对应技术,利用视觉基础模型的强大能力,仅需极少样本即可实现对新类别物体的双臂操作适应,甚至能零样本泛化到完全未见过的物体类别。实验表明,该方法在仿真和真实环境中均取得高成功率,显著提升了机器人在非结构化环境中的实用性。
而去年获奖的 D(R,O) Grasp 则针对不同形态灵巧手的抓取策略泛化难题,创新性地构建了机器人与物体的交互统一表示,突破了传统“一机一策”局限,实现了“一脑多形”的跨本体泛化——用一个AI模型支持LeapHand、Shadow Lite、XHand、SoftHand等多种灵巧手(涵盖3/4/5指、软体与硬质)完成复杂抓取操作。
据介绍,这一系列研究成果的落地,将显著降低机器人操作技能的学习成本与部署门槛,推动具身智能从实验室走向真实场景的规模化应用,帮助机器人真正摆脱遥控器,自主理解世界,自主改变世界。
RoboScience机器科学成立于2024年12月,是一家通用具身智能企业,由前苹果AI平台技术负责人、斯坦福大学AI lab硕士田野和新加坡国立大学助理教授、斯坦福大学AI lab博士邵林联合创立。公司聚焦机器人与物理世界交互的本质,创新定义具身智能标准数据格式,搭建了融合世界模型与通用操作模型 VLOA(Vision-Language-Object-Action)大模型,可指导任意机器人操作任意对象,完成任意任务。公司在机器人本体、末端执行器、多模态物理仿真等关键领域实现全栈布局,软硬一体加速具身智能技术规模化落地。
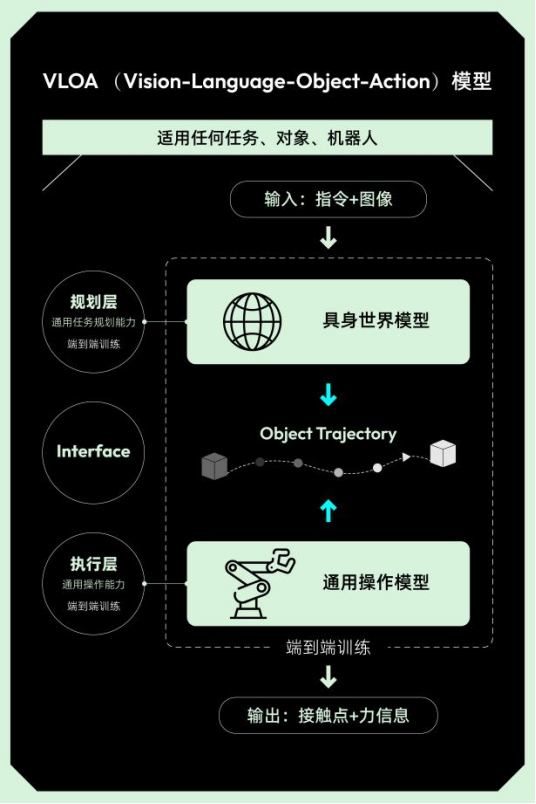
RoboScience机器科学VLOA大模型
目前,机器科学已完成多轮融资,投资方包括京东集团、商汤科技、达晨财智、招商局创投、零一创投、普华资本等多家 CVC 和财务机构,近期又获得了多家国内外产业龙头、互联网大厂、头部财务机构等的多轮注资。公司在北京、深圳、苏州、杭州设有研发和生产中心,集结了来自斯坦福、中科大、新加坡国立大学等顶尖学府以及苹果、字节、腾讯、大疆等头部企业的顶尖人才。在产业化落地方面,公司已与多家零售、物流、康养服务企业及机器人本体、灵巧手公司开展试点合作,并计划于今年实现面向工业与商业场景的标准化机器人本体产品量产。
未来,机器科学将持续致力于推动各类机器人广泛应用于零售、物流、工业、家庭等场景,为真实世界提供安全、智能、高效的解决方案。


